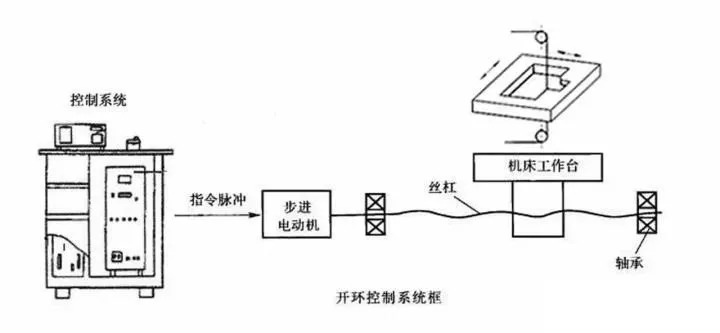
开环控制(Open-loop control system )指调节系统不接受反馈的控制,只控制输出,不计后果的控制。又称为无反馈控制系统。在数控机床中由步进电机和步进电机驱动线路组成。数控装置根据输入指令,经过运算发出脉冲指令给步进电机驱动线路,从而驱动工作台移动一定距离。
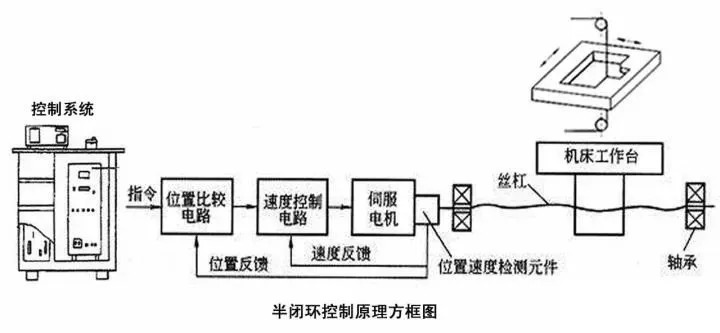
半闭环控制系统的工作原理和全闭环伺服系统相似,只是位置检测器不是安装在工作台上,而是安装在伺服电机的轴上的编码器作反馈运动控制。
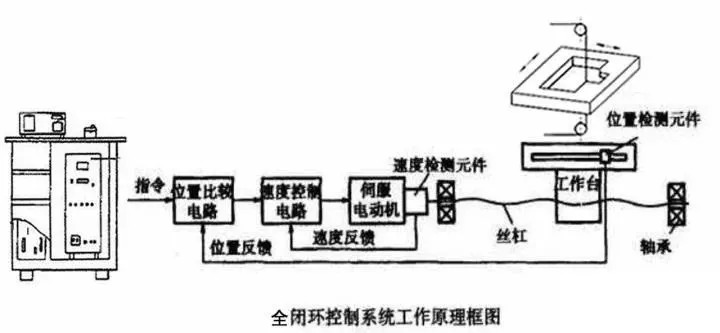
全闭环控制简称闭环控制(closed-loop control system)则是由信号正向通路和反馈通路构成闭合回路的自动控制系统,又称反馈控制系统。由伺服电机、比较线路、伺服放大线路、速度检测器和安装在工作台上的位置检测器(直线光栅尺)组成,通过软件实时补偿丝杆的精度误差和换向回差,自动检测并与指令值进行比较,用差值进行控制。
通俗的讲就是,全闭环是有光栅尺,半闭环没有光栅尺,只有编码器。电机说我走了一圈就是一圈,这叫半闭环,电机说我走了一圈,然后还要问光栅尺,说我走了是一圈吗,光栅尺说是走了一圈,那就是一圈,说不是,那电机还要走点。这就是全闭环。
工作原理
开环控制系统不能检测误差,也不能校正误差。闭环控制系统不管出于什么原因(外部扰动或系统内部变化),只要被控制量偏离规定值,就会产生相应的控制作用去消除偏差。
结构组成
开环系统没有检测设备,组成简单,但选用的元器件要严格保证质量要求。闭环系统具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性。
稳定性
开环控制系统的稳定性比较容易解决。这种控制系统优点是比较简单,工作稳定,容易掌握使用,但精度和速度的提高受到限制。控制精度和抑制干扰的性能都比较差,而且对系统参数的变动很敏感。因此,一般仅用于可以不考虑外界影响,或惯性小,或精度要求不高的一些场合。
半闭环系统中反馈回路的引入增加了系统的复杂性。众所周知利用编码器作反馈的半闭环运动控制的精度还需传动丝杆或其它连接件的精度来保证,因此无法控制机床传动机构所产生的传动误差、机床空走高速运转时传动机构所产生热变形误差以及加工过程中传动系统磨损而产生的误差。但半闭环伺服系统所能达到的精度、速度和动态特性优于开环伺服系统,其复杂性和成本低于全闭环伺服系统。
全闭环控制是用直线光栅作反馈,通过软件实时补偿丝杆的精度误差和换向回差。就免除了一切机械传动链的误差影响,是一种很精密的直线运动控制方式,能消除机床传动机构所产生的传动误差、机床空走高速运转时传动机构所产生热变形误差以及加工过程中传动系统磨损而产生的误差,大大提高了机床的定位精度、重复定位精度以及精度可靠性。但作为提高位置精度的关键部件光栅尺的准确度等级是首先要考虑的。
文章来源:网络
Copyright © 2019-2022 潍坊欧信智控科技有限公司 All Rights Reserved. ICP备案:鲁ICP备19020629号
 鲁公网安备37079202370802号
鲁公网安备37079202370802号
公司地址:山东潍坊经济开发区友谊路17号4幢销售热线:0536-8862757 技术支持:艾尚网络










 联系我们
联系我们 在线服务
在线服务 添加微信
添加微信
