常用运动学构形
1、笛卡尔操作臂
优点:很容易通过计算机控制实现,容易达到高精度。
缺点:妨碍工作,且占地面积大,运动速度低,密封性不好。
焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂、目标跟随、排爆等一系列工作。
特别适用于多品种,便批量的柔性化作业,对于稳定,提高产品质量,提高劳动生产率,改善劳动条件和产品的快速更新换代有着十分重要的作用。
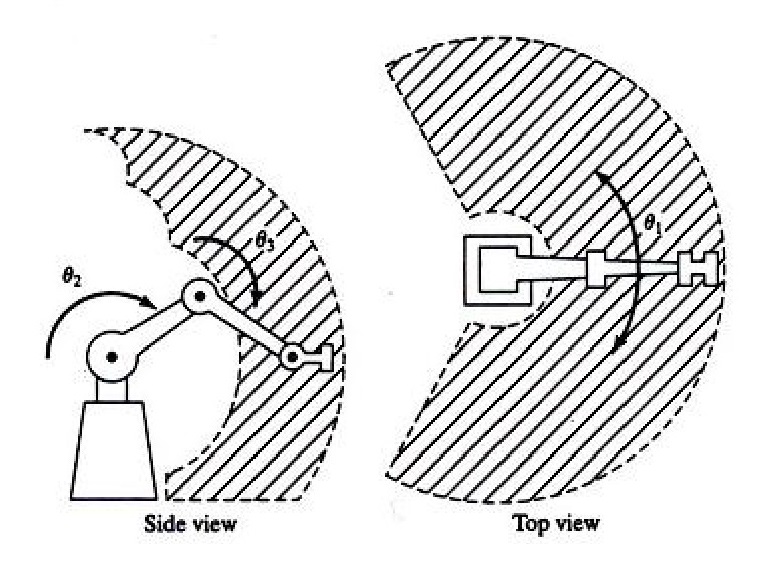
2、铰链型操作臂(关节型)
关节机器人的关节全都是旋转的,类似于人的手臂,工业机器人中最常见的结构。它的工作范围较为复杂。
汽车零配件、模具、钣金件、塑料制品、运动器材、玻璃制品、陶瓷、航空等的快速检测及产品开发。
车身装配、通用机械装配等制造质量控制等的三坐标测量及误差检测。
古董、艺术品、雕塑、卡通人物造型、人像制品等的快速原型制作。
汽车整车现场测量和检测。
人体形状测量、骨骼等医疗器材制作、人体外形制作、医学整容等。
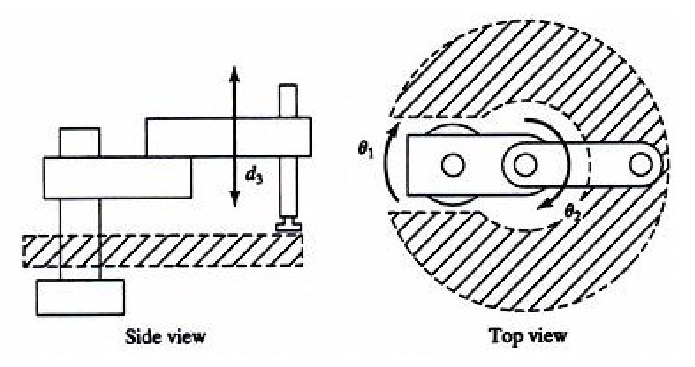
3、SCARA操作臂
SCARA机器人常用于装配作业,最显著的特点是它们在x-y平面上的运动具有较大的柔性,而沿z轴具有很强的刚性,所以,它具有选择性的柔性。这种机器人在装配作业中获得了较好的应用。
大量用于装配印刷电路板和电子零部件。
搬动和取放物件,如集成电路板等。
广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。
搬取零件和装配工作。
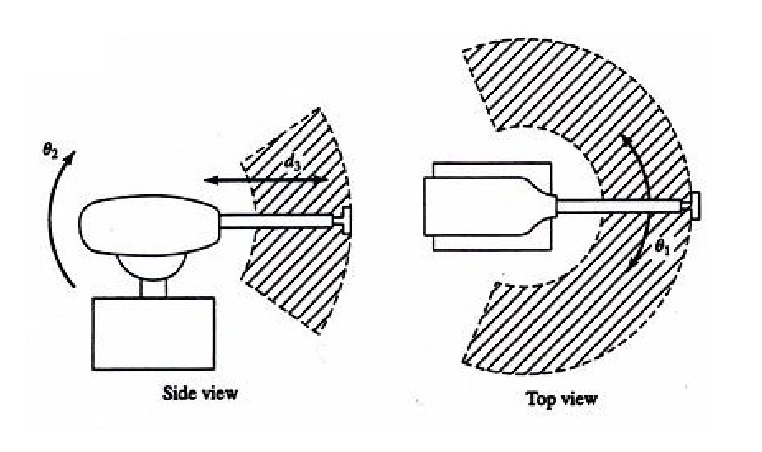
4、球面坐标型操作臂
球面坐标型操作臂中心支架附近的工作范围大,两个转动驱动装置容易密封,覆盖工作空间较大。但该坐标复杂,难于控制,且直线驱动装置存在密封的问题。
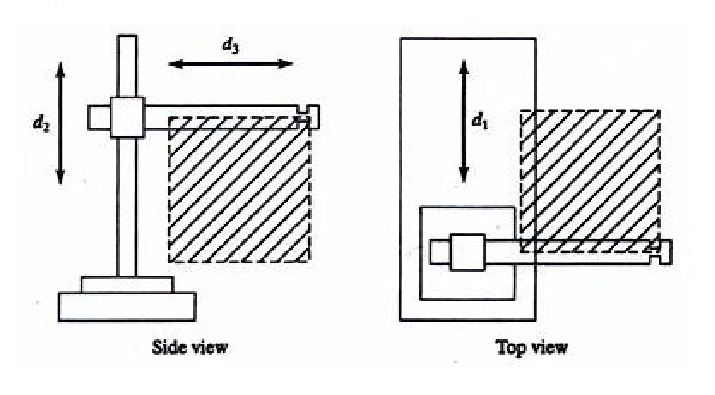
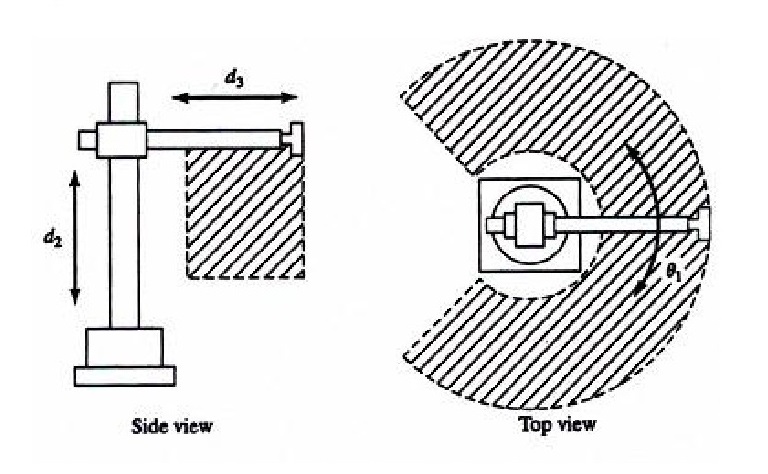
5、圆柱面坐标型操作臂
优点:且计算简单;直线部分可采用液压驱动,可输出较大的动力;能够伸入型腔式机器内部。
缺点:它的手臂可以到达的空间受到限制,不能到达近立柱或近地面的空间;
直线驱动部分难以密封、防尘;后臂工作时,手臂后端会碰到工作范围内的其它物体。
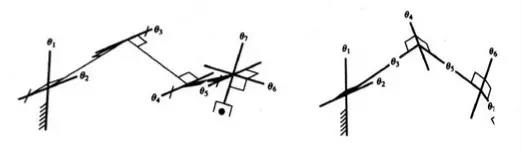
6、冗余机构
通常空间定位需要6个自由度,利用附加的关节可以帮助机构避开奇异位形。下图为7自由度操作臂位形。
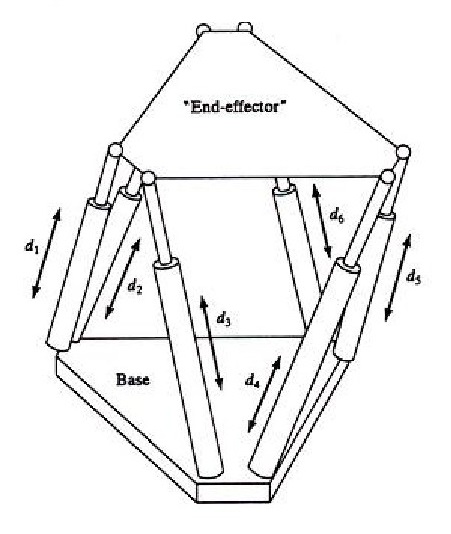
7、闭链机构
闭链机构可以提高机构刚度,但会减小关节运动范围,工作空间有一定减小。
运动模拟器;
并联机床;
微操作机器人;
力传感器;
生物医学工程中的细胞操作机器人、可实现细胞的注射和分割;
微外科手术机器人;
大型射电天文望远镜的姿态调整装置;
混联装备等,如SMT公司的Tricept混联机械手模块是基于并联机构单元的模块化设计的成功典范。
机器人的主要技术参数
机器人的技术参数反映了机器人可胜任的工作、具有的最高操作性能等情况,是设计、应用机器人必须考虑的问题。机器人的主要技术参数有自由度、分辨率、工作空间、工作速度、工作载荷等。
1、自由度
机器人具有的独立坐标轴运动的数目。机器人的自由度是指确定机器人手部在空间的位置和姿态时所需要的独立运动参数的数目。手指的开、合,以及手指关节的自由度一般不包括在内。机器人的自由度数一般等于关节数目。机器人常用的自由度数一般不超过5~6个。
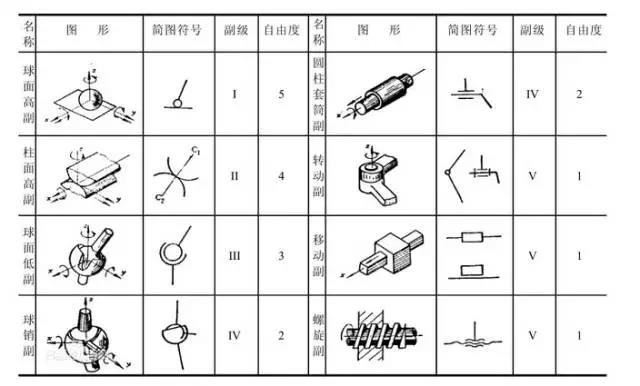
2、关节
即运动副,允许机器人手臂各零件之间发生相对运动的机构。
3、工作空间
机器人手臂或手部安装点所能达到的所有空间区域。其形状取决于机器人的自由度数和各运动关节的类型与配置。机器人的工作空间通常用图解法和解析法两种方法进行表示。
4、工作速度
机器人在工作载荷条件下、匀速运动过程中,机械接口中心或工具中心点在单位时间内所移动的距离或转动的角度。
5、工作载荷
指机器人在工作范围内任何位置上所能承受的最大负载,一般用质量、力矩、惯性矩表示。 还和运行速度和加速度大小方向有关,一般规定高速运行时所能抓取的工件重量作为承载能力指标。
6、分辨率
能够实现的最小移动距离或最小转动角度。
7、精度
重复性或重复定位精度:指机器人重复到达某一目标位置的差异程度。或在相同的位置指令下,机器人连 续重复若干次其位置的分散情况。它是衡量一列误差值的密集程度,即重复度。
文章来源:网络
Copyright © 2019-2022 潍坊欧信智控科技有限公司 All Rights Reserved. ICP备案:鲁ICP备19020629号
 鲁公网安备37079202370802号
鲁公网安备37079202370802号
公司地址:山东潍坊经济开发区友谊路17号4幢销售热线:0536-8862757 技术支持:艾尚网络










 联系我们
联系我们 在线服务
在线服务 添加微信
添加微信
